We are thrilled to announce that our recent paper “Movement Primitive Diffusion: Learning Gentle Robotic Manipulation of Deformable Objects” has been published in the IEEE Robotics and Automation Letters (RA-L).
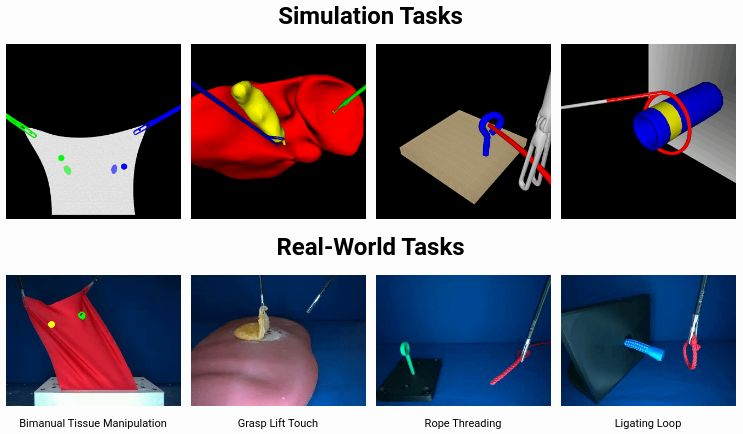
Movement Primitive Diffusion (MPD) combines the versatility of diffusion-based imitation learning with the high motion quality of Probabilistic Dynamic Movement Primitives (ProDMPs) for gentle manipulation of deformable objects. Through experiments in the real world and in simulation, we show that MPD is data efficient, can learn complex motions for grasping and manipulating deformable objects, and works end-to-end from raw image observations to smooth end-effector trajectories with guaranteed initial conditions.
You can find the code, the data, and a video on the project page!